本文最后更新于 2025年8月20日 晚上
【数学】矩阵
数学上,一个 m × n 的矩阵是指一个有 m 行 n 列元素的矩形阵列。
A=a11a21⋮am1a12a22⋮am2……⋱…a1na2n⋮amn
矩阵的作用
-
表示一个空间
矩阵由多个基向量构成,恰巧可以描述一个多维空间。
-
表示一种变换
当矩阵的基向量本质是另一个空间的向量时,该矩阵的向量,也可以重新转换回基向量所在的空间,这个过程就叫变换。
例如:物体空间实际是利用物体在世界空间中的三个向量组成的新空间,该空间矩阵可与其向量做乘法运算,使其向量转换回世界空间。
所以根据上述内容的分析可以得出常见矩阵之间的关系:
物体空间矩阵=物体变换矩阵=物体到世界空间变换矩阵。
矩阵的分类
- 对称矩阵:以主对角线为对称轴,各元素对应相等的矩阵。
- 对角矩阵:主对角线之外的元素皆为 0 的矩阵。
- 数量矩阵:主对角线元素都为同一数量的对角矩阵。
- 单位矩阵:数量为 1 的数量矩阵,字母表示为 E。
- 正交矩阵:乘上自身转置矩阵后等于单位矩阵的矩阵。
正交矩阵
定义
若矩阵 A 为正交矩阵,则:
AAT=E
性质
矩阵的运算
转置
将矩阵沿主对角线反转后得到的矩阵。
性质
- (AT)T=A
- (A+B)T=AT+BT
- (kA)T=kAT
- (AB)T=BTAT
加法
矩阵加法要求左右两个矩阵大小一致,运算上直接对每个相同位置的元素相加即可。
[a1a3a2a4]+[b1b3b2b4]=[a1+b1a3+b3a2+b2a4+b4]
乘法
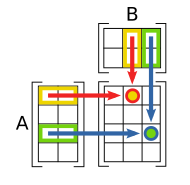
所有乘法本质都是乘以矩阵,因为标量和向量都可以转换或看成矩阵的一种。针对矩阵相乘,一种简单的记忆方法,是对于每个元素,取左矩阵一行,右矩阵一列,相乘再加即可(如下图)。
乘以标量
乘以标量时直接对每个元素乘以该标量即可。
[a1a3a2a4]∗b=[a1∗ba3∗ba2∗ba4∗b]
乘以向量
相当于给矩阵中每个基向量乘以一个系数后相加(线性组合)。
[ixiyjxjy]∗[xy]=[ix∗xiy∗x]+[jx∗yjy∗y]=[ix∗x+jx∗yiy∗x+jy∗y]
乘以矩阵
相当于左矩阵乘以右矩阵的每个基向量后重新拼成一个矩阵。
[a11a21a12a22]∗[b11b21b12b22]=[a11∗b11+a12∗b21a21∗b11+a22∗b21a11∗b12+a12∗b22a21∗b12+a22∗b22]
余子式
将矩阵中某些行或列去除后,剩下的元素组成的新矩阵。
-
k 阶余子式
去除行或列的数量被称为余子式的阶数。
对于 1 阶余子式通常记作Mij,表示去除了 i 行 j 列。
-
代数余子式(余因子)
一种拥有正负号的余子式叫做代数余子式,其正负号是通过移除的行列序号判断的。
如Mij的代数余子式记作 Cij=(−1)i+jMij。
行列式
输入一个矩阵,输出一个标量。记作 det(A) 或 ∣A∣ 。
-
求解 n 阶矩阵
设Sn是序列{1,2,…,n}(即列编号)的全部置换的合集(相关知识见“组合与排列”)
∣A∣=σ∈Sn∑sgn(σ)i=1∏nai,σ(i)
或者利用代数余子式计算:
∣A∣=j=1∑na1,j∣C1,j∣
-
求解 2 阶矩阵
a1,1a2,1a1,2a2,2=a1,1a2,2−a1,2a2,1
余因子矩阵
每一个元素都等于该元素位置在原矩阵的子行列式(代数余子式的行列式)。
cof(A)=∣C11∣⋮∣Cm1∣…⋱…∣C1n∣⋮∣Cmn∣
伴随矩阵
余因子矩阵的转置矩阵,记作 adj(A) 或 A∗。
adj(A)=cof(A)T
逆矩阵
A−1=det(A)adj(A)
性质
- (AT)−1=(A−1)T